Универсальный силовой контроллер управления электродвигателями с обратной связью
Силовой контроллер предназначен для управления по широкой интерфейсной базе двумя двигателями постоянного тока, или одним двухфазным шаговым электродвигателем, или одним бесколлекторным трехфазным двигателем постоянного тока с использованием обратных связей по моменту на валу двигателя, по его скорости, по углу поворота вала с использованием относительных или абсолютных энкодеров, датчиков тока, датчиков Холла.
Данное устройство отличается от предложений конкурентов наличием следующих опций:
- Широкий выбор интерфейсов управления устройством: RS232, RS485, USB, CAN, аналоговое управление, управление через цифровой или аналоговый радиоканал.
- Возможность гальванической развязки силовой, микропроцессорной и интерфейсной частей между собой.
- Возможность использования обратной связи по потребляемому току, моменту на валу мотора, по скорости вращения вала двигателя (в том числе без использования внешних датчиков), по положению вала двигателя (с использованием абсолютного, работающего по протоколу SSI, или относительного энкодера).
- Наличие двух твердотельных реле, позволяющих управлять включением/выключением внешних устройств (например, реле включения зажигания и стартера автомобиля-робота).
- Возможность аварийного останова, которая обеспечивается подключением четырех концевых датчиков.
- Наличие термозащиты.
- Выбор способа динамического торможения.
- Защита от падения уровня питающего напряжения.
- Бесшунтовая защита от коротких замыканий.
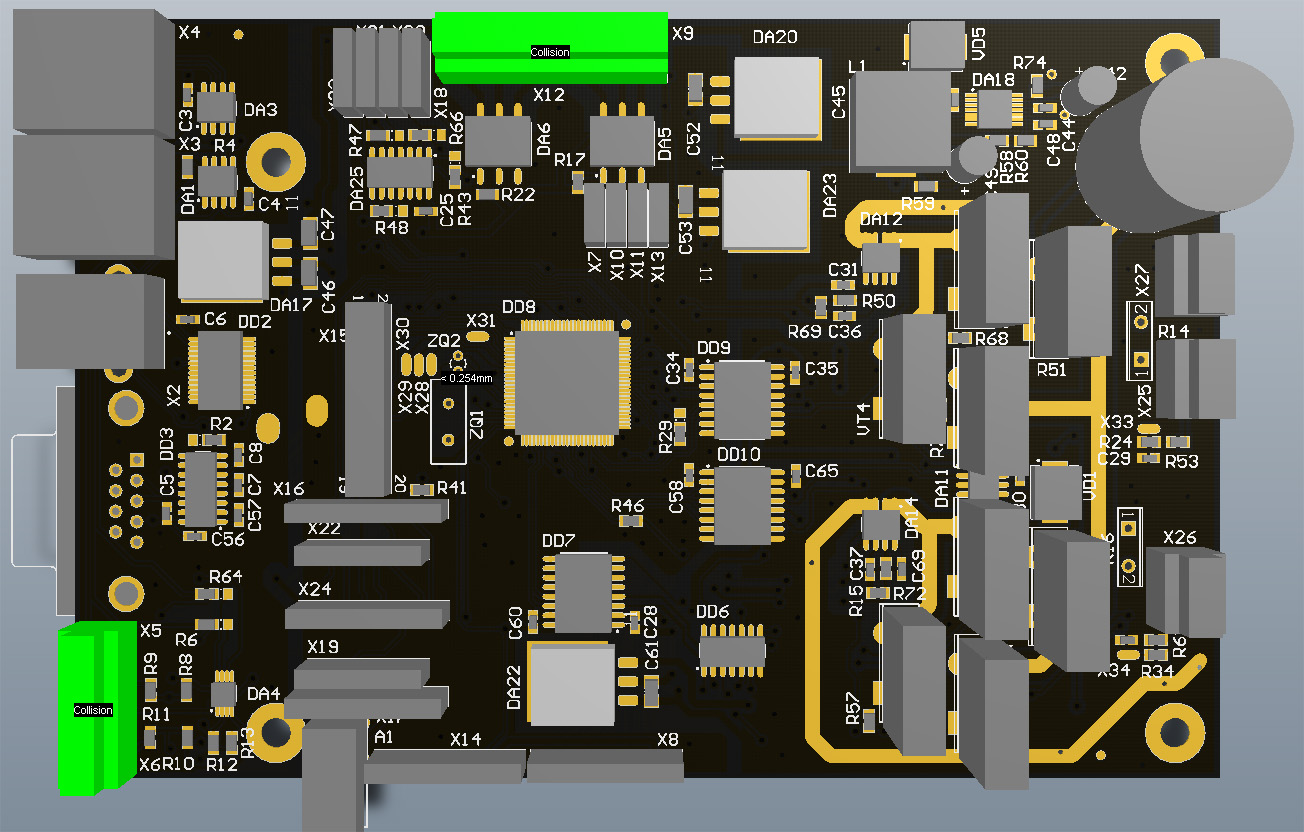
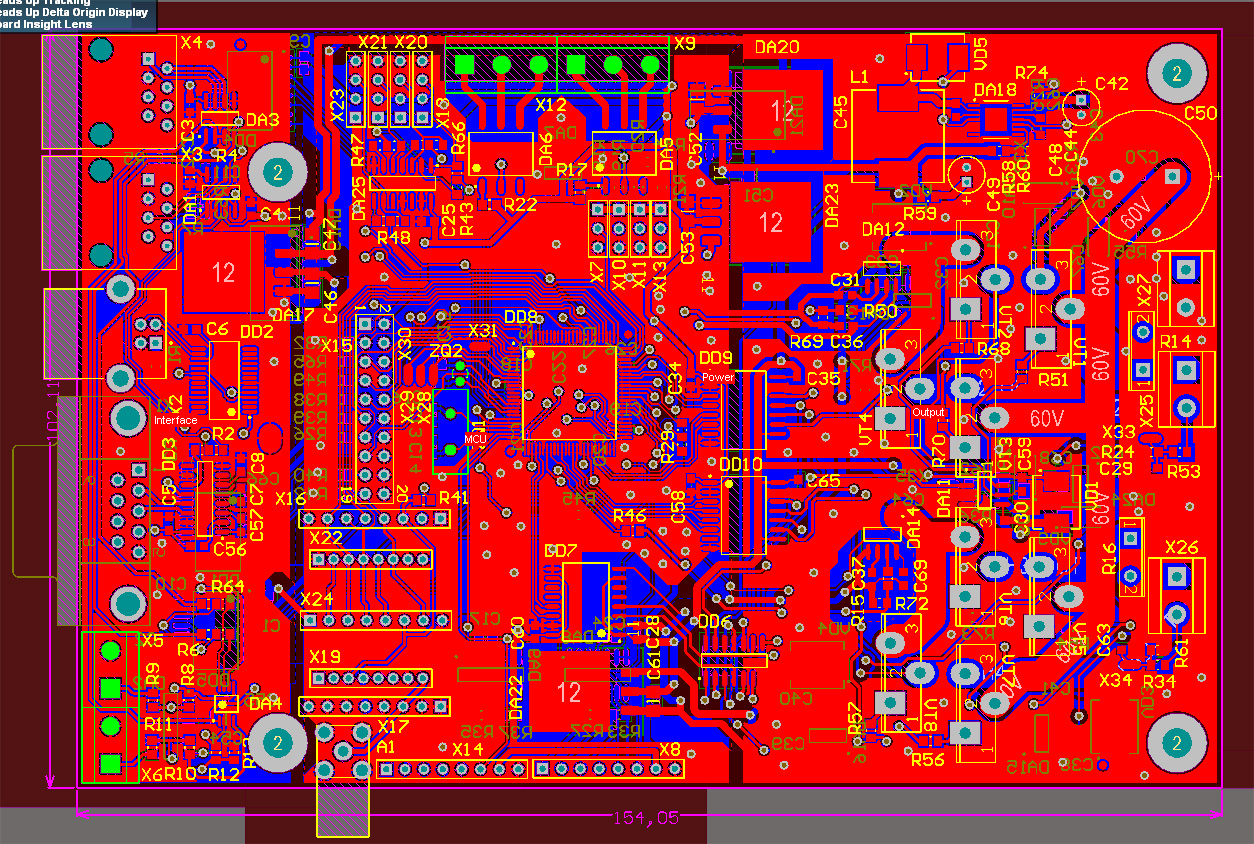
3D-модель платы UniMoto:

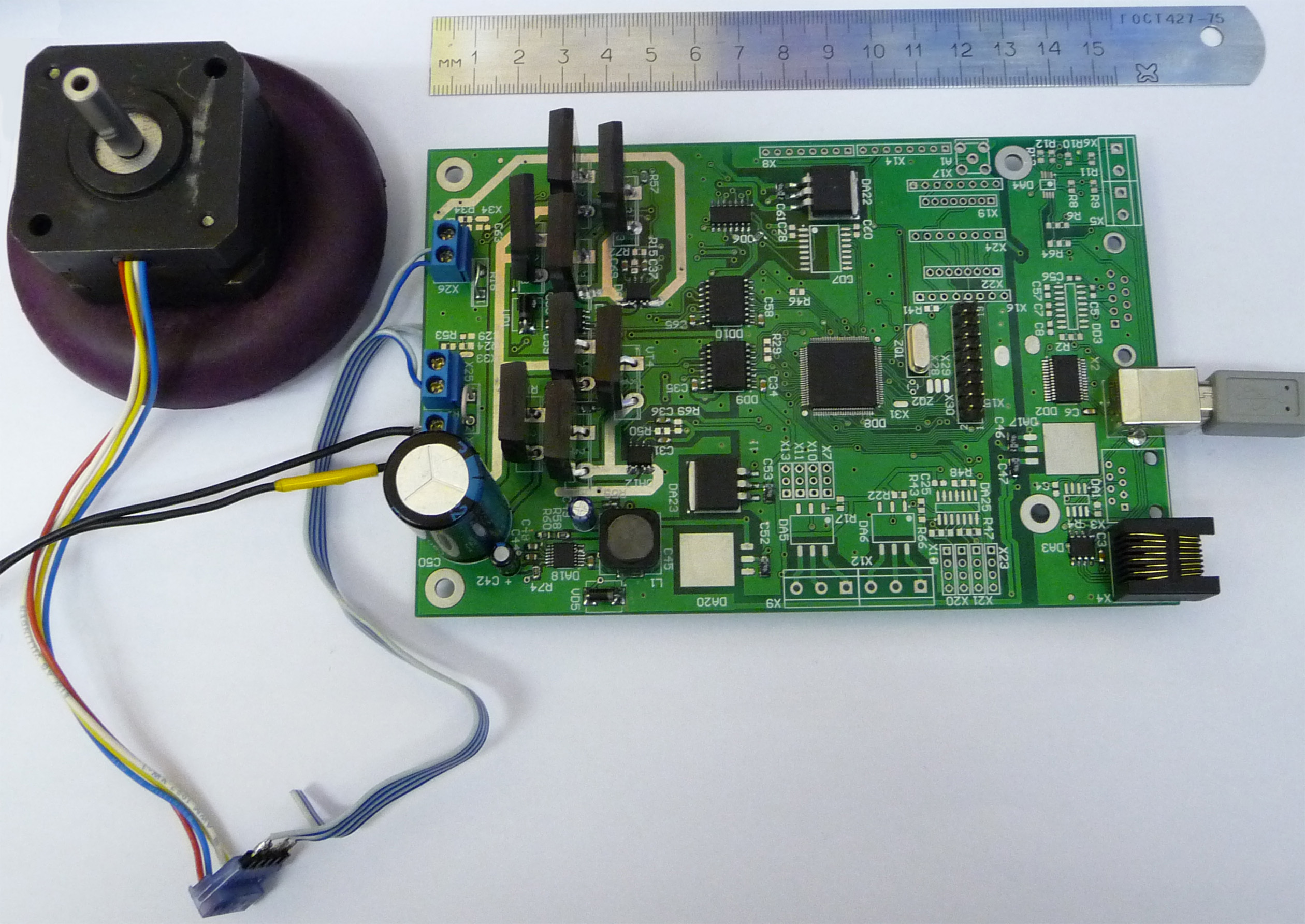
Подключение шагового двигателя к готовому прототипу: